Product Introduction
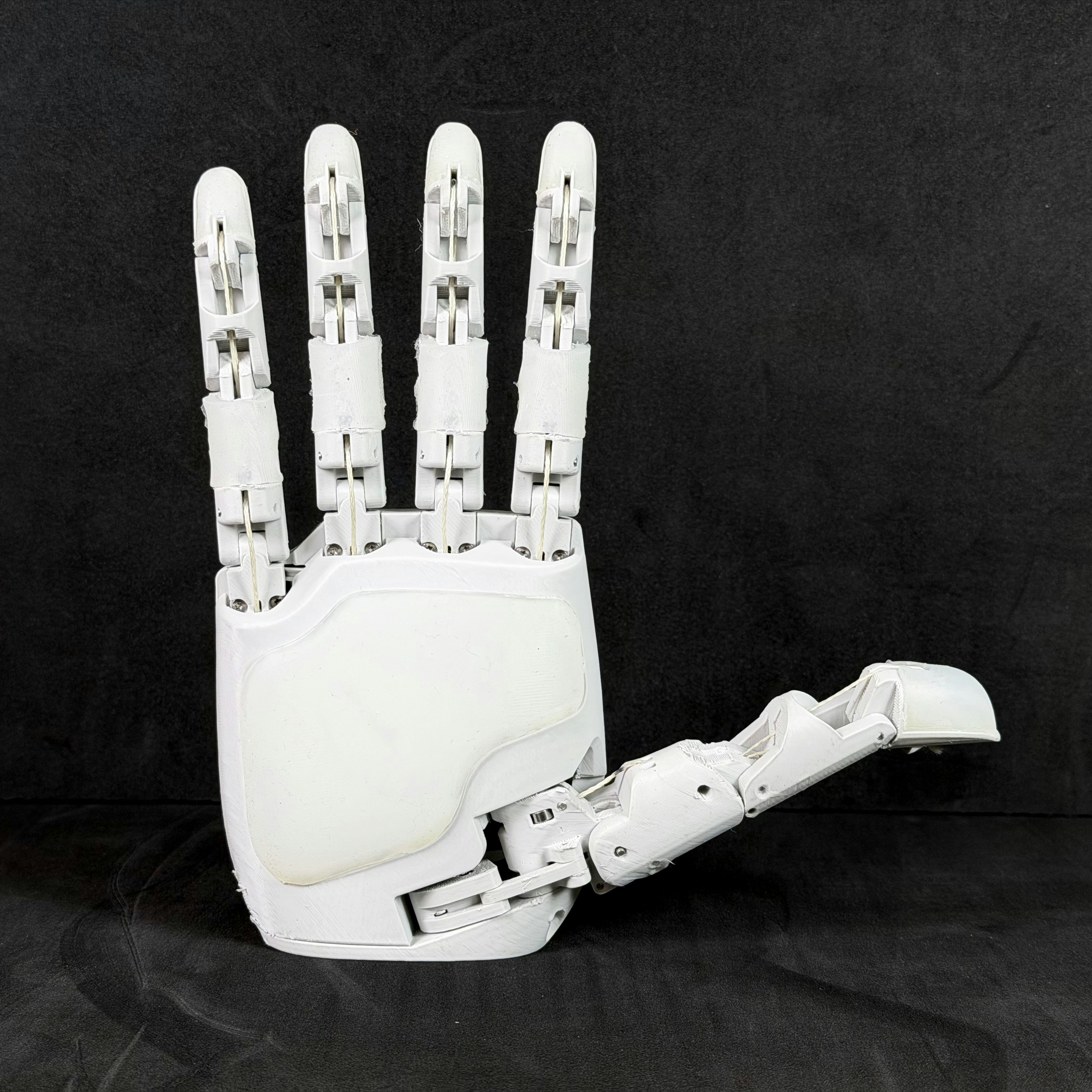
- Aero Hand Open is a lightweight, open-source robotic hand designed for research, education, and prototyping, utilizing a tendon-driven system to replicate human-like motion. It is fully 3D-printable and modular, enabling customization and cost-effective reproduction while supporting integration with ESP32 microcontrollers and ROS2 frameworks for advanced robotics applications. The design emphasizes accessibility, offering researchers and developers a platform to experiment with embodied AI and robotic manipulation.
- The core value of Aero Hand Open lies in its ability to democratize advanced robotic manipulation by providing an affordable, adaptable, and open-source solution. It bridges the gap between academic research and practical prototyping, offering a functional alternative to prohibitively expensive commercial robotic hands while maintaining high performance and scalability.
Main Features
- The hand features 7 active degrees of freedom (DOF) controlling 16 joints, enabling complex, human-like gestures and precise object manipulation through its tendon-driven mechanism. This design ensures smooth motion and adaptability to tasks like grasping, rotating, or handling delicate objects.
- All components, including CAD files, electronics schematics, firmware, and a Python SDK (coming soon), are open-source, allowing users to modify, extend, or integrate the hand into custom projects. The 3D-printable structure reduces manufacturing costs and supports rapid iteration.
- Built for embodied AI research, the hand is compatible with ROS2, enabling seamless integration with machine learning pipelines and robotic control systems. The ESP32 microcontroller provides wireless connectivity for remote operation and real-time data feedback.
Problems Solved
- Aero Hand Open addresses the high cost and limited accessibility of advanced robotic hands, which often hinder academic institutions and small-scale developers from pursuing robotics research. By offering a sub-$500 solution, it lowers entry barriers for experimentation.
- The product targets researchers, educators, and robotics enthusiasts who require a functional, customizable platform for AI-driven manipulation, prosthetic development, or human-robot interaction studies. It is also suited for industrial prototyping in automation and assistive technology.
- Typical use cases include training reinforcement learning models for dexterous manipulation, simulating human hand movements in collaborative robots, and prototyping low-cost assistive devices for healthcare or rehabilitation applications.
Unique Advantages
- Unlike proprietary robotic hands, Aero Hand Open provides full transparency in design and control, with no restrictions on modification or commercial use. This contrasts with closed-source alternatives that lock users into vendor-specific ecosystems.
- Its modular architecture allows users to replace or upgrade individual components, such as sensors or actuators, without redesigning the entire system. The tendon-driven mechanism mimics biological efficiency, reducing mechanical complexity compared to gear-based systems.
- Competitive advantages include a 70% cost reduction versus commercial counterparts, ROS2 compatibility for AI/ML integration, and community-driven development backed by detailed documentation. The 3D-printable design ensures global accessibility, even in resource-limited environments.
Frequently Asked Questions (FAQ)
- Can the hand be customized for specific research needs? Yes, the open-source CAD files and modular design enable users to modify finger lengths, tendon configurations, or sensor placements. The Python SDK (upcoming) will further simplify software customization for task-specific workflows.
- Is ROS2 support included out of the box? Yes, the hand ships with ROS2 drivers and pre-configured simulation packages, allowing immediate integration with existing robotic frameworks. Documentation includes tutorials for deploying manipulation algorithms.
- What hardware is required to assemble the hand? All structural parts are 3D-printable using standard PLA or PETG materials. Users need basic tools, micro servos, tendons, and an ESP32 module, with a detailed bill of materials provided in the assembly guide.